
A paper on poimo, a personal mobility device with a balloon-like inflatable structure, developed as a joint research project between mercari R4D and the JST ERATO Kawahara Universal Information Network Project organized by Professor Yoshihiro Kawahara of the University of Tokyo’s Graduate School of Engineering, will be delivered in October 2020. It was accepted at the international conference UIST 2020 for human-computer interaction (HCI), which is a field of research dealing with user interface technology.
The accepted paper, titled “poimo: Portable and Inflatable Mobility Devices Customizable for Personal Physical Characteristics,” proposes a completely new personal mobility in which the main parts are replaced by balloon structures, in a design that allows the shape to be customized for each person individually for the first time.
Based on a lightweight and soft balloon-like structure that can be deflated and folded, poimo opens up a new field of personal mobility.
Key points of the announcement
-
We developed the poimo personal mobility device with a balloon structure that can be custom designed for each person just by posing for the ride. We created prototypes of an electric motorcycle type and a manual wheelchair type, each of which can be folded completely when deflated.
-
By developing a new vehicle using balloon structures for the body and wheels, customized vehicles can be made one by one. Newly developed design software makes it easy for anyone to design their personal mobility.
-
Lightweight and soft, deflatable and foldable, poimo opens up a new field in personal mobility. By leveraging the fact that it can be custom-made for each individual, it will contribute to the realization of an inclusive society where everyone can acquire a means of transportation that suits them.
Research background
In recent years, various concepts of movement have been advocated, including MaaS (Mobility as a Service), and many personal mobility methods such as electric scooters and standing two-wheelers. However, many of these traditional mobile devices are heavy and bulky, which reduces their portability and storability. And since they use highly rigid structures such as pipes and boards, they remain bulky even when folded, while there are also concerns about collision safety and difficulties in customizing for each individual.
Currently, various studies are being conducted in the fields of human-computer interaction (HCI) and robotics using inflatable structures (air pressure inflated balloon structures). In the field of HCI, examples include the development of user interfaces using softness and deformation, and the production of inflatable furniture and architectural structures using digital fabrication technology. Robots using inflatable structures are called “inflatable robots,” and are anticipated for application to robots that collaborate with humans. In this context, inflatable structures are easily referred to as “balloon structures.” Our research team has been focusing on balloon construction for a long time and has developed soft motors and robots that harness its characteristics. At CHI 2020, an international conference in the field of HCI, a prototype of personal mobility, the predecessor to the subject of this presentation, was announced. However, at that time, the wheels could not be replaced with balloon structures, and there were issues with the weight of the hard wheels and their size when folded. We also didn’t fully understand how to use balloon structures to realize complex-shaped vehicles consisting of many parts.
Research summary
poimo (which stands for POrtable and Inflatable MObility) is a new type of personal mobility device that combines comfortable size and portability, with many of its parts from body to wheels being constructed using balloon structures. By advantage of the light weight and soft balloon structure, it is possible to fold the vehicle into a small size and take it out and inflate it when necessary. To achieve this soft ride, the research team developed a method of making the wheels and steering wheel, which conventionally are made of hard materials, out of balloons. Simple plastic balloons like floatation devices are not strong enough, so we adopted high-strength “drop stitch fabrics” that can withstand high air pressure. We have confirmed that the body made of drop stitch fabric is lightweight but strong enough to support human weight. The drop stitch fabric is a composite of cloth and resin that does not puncture easily.
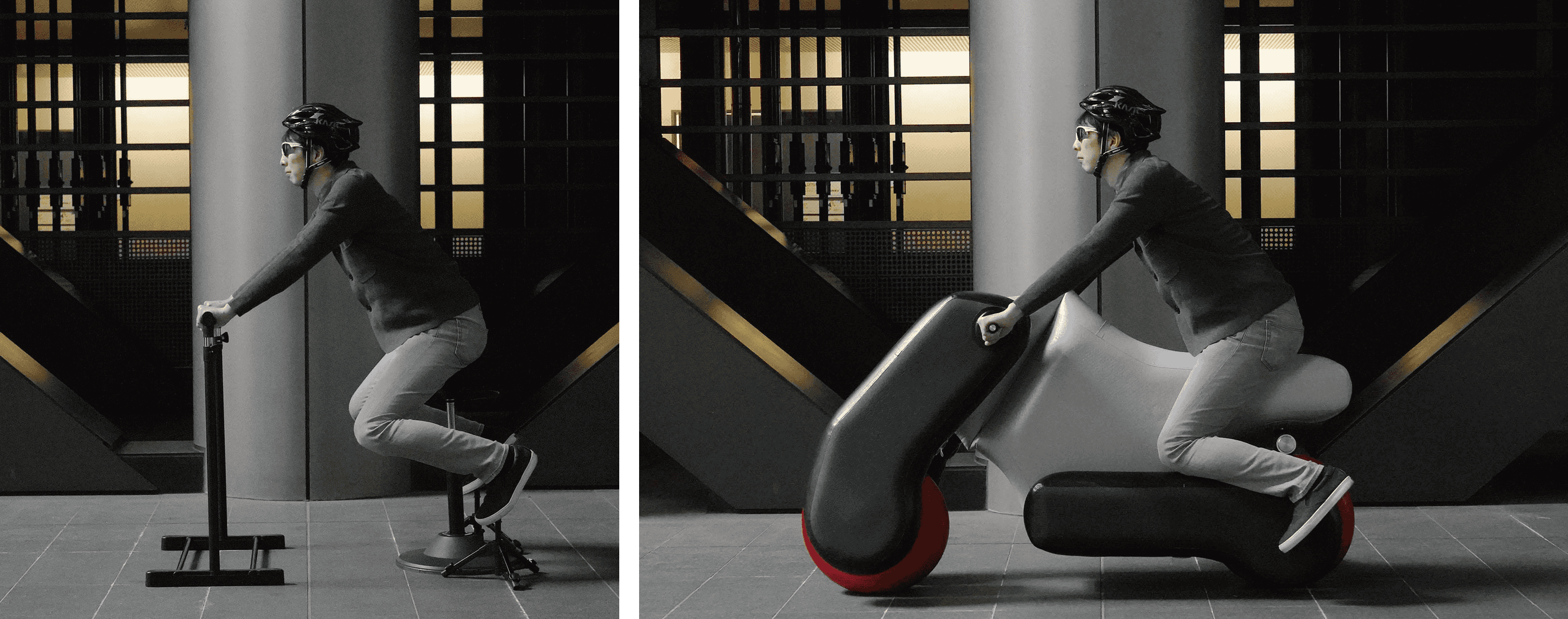
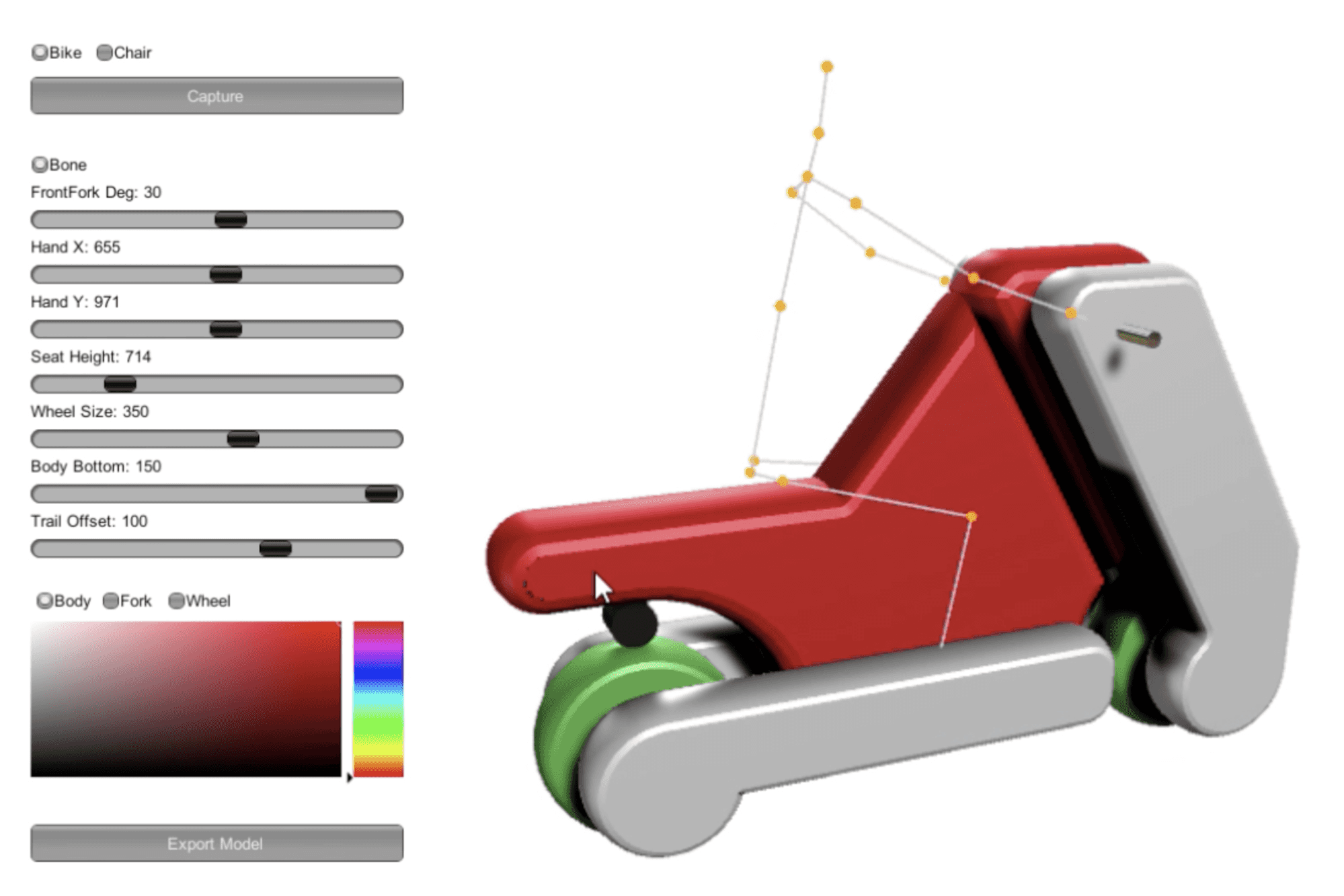
Furthermore, in this research, we developed dedicated software that allows users to design vehicles of a size and shape that suit their height and posture. For example, when designing an electric motorcycle type poimo, the user first imagines the motorcycle he wants to make and then poses to ride it using a chair or the like. The software extracts the 3D information of the posture from it, automatically designs the vehicle of the shape and size according to the user’s pose, and displays it on the screen as a 3D model. Based on the proposed design, the user can further customize the steering wheel, seat position, etc. At this time, the design parameters are automatically adjusted by the software so that the strength, stability, and operability are not compromised. The final adjusted design is output as data that can be used for ordering.
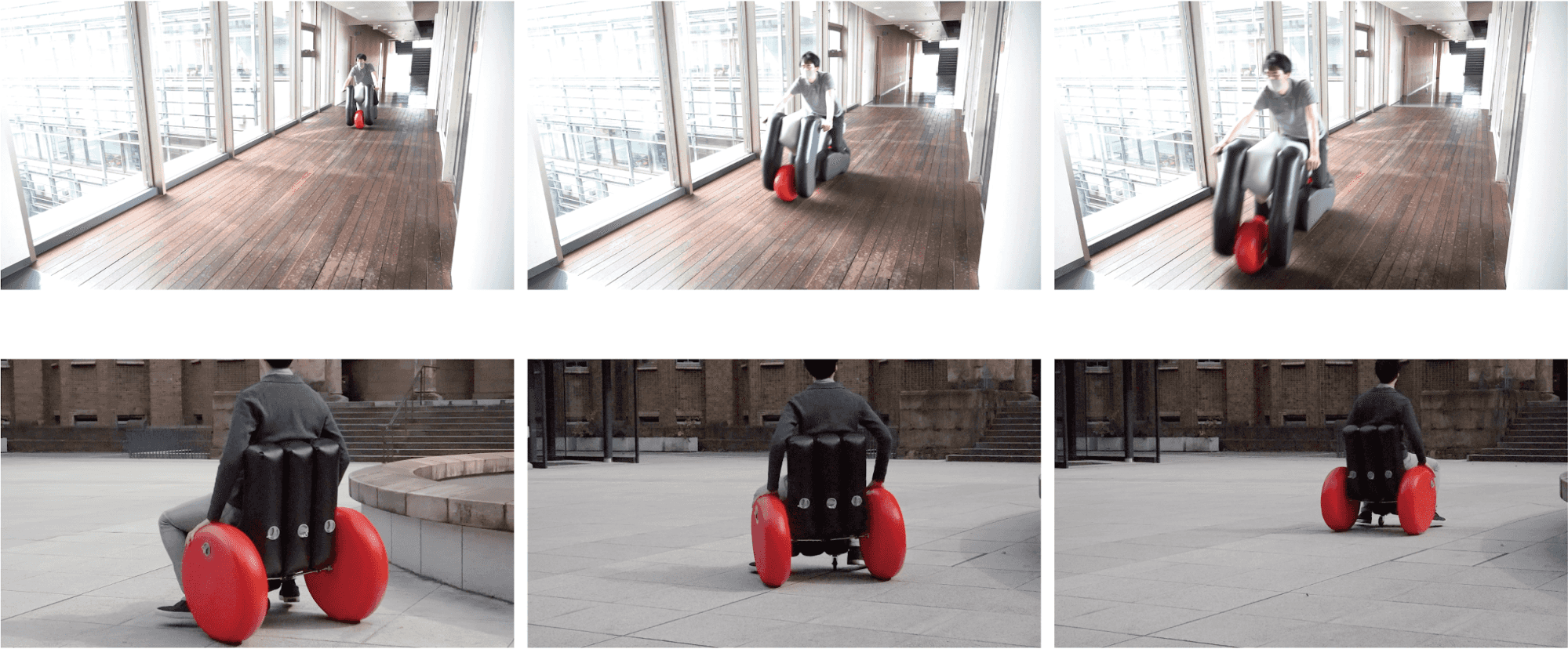
Using the proposed method, the research team actually prototyped several electric motorcycle and manual wheelchair type poimo. The motorcycle type is made by combining seven inflatable structures, including the wheels. Powered by a small brushless motor and lithium-ion battery, the maximum speed is 6km/h. It runs for about an hour on a single charge. The total weight is about 9kg, which is about the same as a folding electric scooter while offering the same size and wheel diameter as an ordinary motorcycle. Handles, bearings, motors, batteries, and electronic circuits cannot be made into balloon structures, but we have made them smaller and lighter so that they are not bulky when folded. The manual wheelchair type is made by combining five inflatable structures including wheels. Since it is manual, no motor or battery is installed. The total weight is about 6.5 kg, which is about half the weight of a normal wheelchair. As an example of customization, we also prototyped a sports-type manual wheelchair, with a long protruding front wheel.
The research team hopes that this research will help increase the freedom of movement in future societies and contribute to an inclusive society in which diverse people can participate in cultural and economic activities. In the future, we will further reduce weight, improve operability, evaluate safety, and conduct empirical experiments for practical application and dissemination.



poimo project members
- Ryuma Niiyama (Lecturer, Department of Intelligent Mechanical Informatics, Graduate School of Information Science and Engineering, The University of Tokyo)
- Hiroki Sato (Academic Support Specialist, Department of Intelligent Mechanical Informatics, Graduate School of Information Science and Engineering, The University of Tokyo)
- Kazzmasa Tsujimura (Graduate School of Interdisciplinary Information Studies Cultural and Human Informatics Course Doctoral course 2nd year, The University of Tokyo)
- Koya Narumi (Assistant Professor, The Interfaculty Initiative in Information Studies, The University of Tokyo)
- Young Ah Seong (Specially Appointed Researcher, Department of Intelligent Mechanical Informatics, Graduate School of Information Science and Engineering, The University of Tokyo)
- Ryosuke Yamamura (mercari R4D researcher)
- Yasuaki Kakehi (Associate Professor,The Interfaculty Initiative in Information Studies, The University of Tokyo)
- Yoshihiro Kawahara (Professor, Department of Electrical Engineering, Graduate School of Engineering, The University of Tokyo)
About the paper
International conference name: 33rd ACM User Interface Software and Technology Symposium (UIST)
Paper title: “poimo: Portable and Inflatable Mobility Devices Customizable for Personal Physical Characteristics”
Authors: Ryuma Niiyama*, Hiroki Sato*, Kazzmasa Tsujimura, Koya Narumi, Young ah Seong, Ryosuke Yamamura, Yasuaki Kakehi, Yoshihiro Kawahara (*Autohors contributed equally)
DOI number: https://dx.doi.org/10.1145/3379337.3415894
About mercari R4D
mercari R4D is a research and development organization established in December 2017 for the purpose of social implementation. R4D stands for Research and the four D’s: Design, Development, Deployment, and Disruption, and has the aim of prompt R&D and social implementation of our technologies. mercari R4D aims to create future innovations in the services and businesses of the Mercari Group with the core concept of “changing the way value is exchanged with the power of technology,” by conducting research on AI, blockchain, HCI (Human Computer Interaction), quantum computing, mobility, and more.
Website : https://r4d.mercari.com/
[Mercari Overview]
Company name: Mercari, Inc.
Location: Roppongi Hills Mori Tower, 6-10-1 Roppongi, Minato-ku, Tokyo 106-6118, Japan
Main Business Activities: Planning, development, and operation of the Mercari marketplace app
Representative: Shintaro Yamada